INCA-ABACO: INfrastrutture di CAlcolo A BAsso COsto
Utilizzo "banale" della programmazione parallela per effettuare un'analisi parametrica
interessante: l'esempio delle sezioni di Poincaré per il modello di Hénon e Heiles.
|
|
INCA-ABACO: INfrastrutture di CAlcolo A BAsso COsto Utilizzo "banale" della programmazione parallela per effettuare un'analisi parametrica interessante: l'esempio delle sezioni di Poincaré per il modello di Hénon e Heiles. |
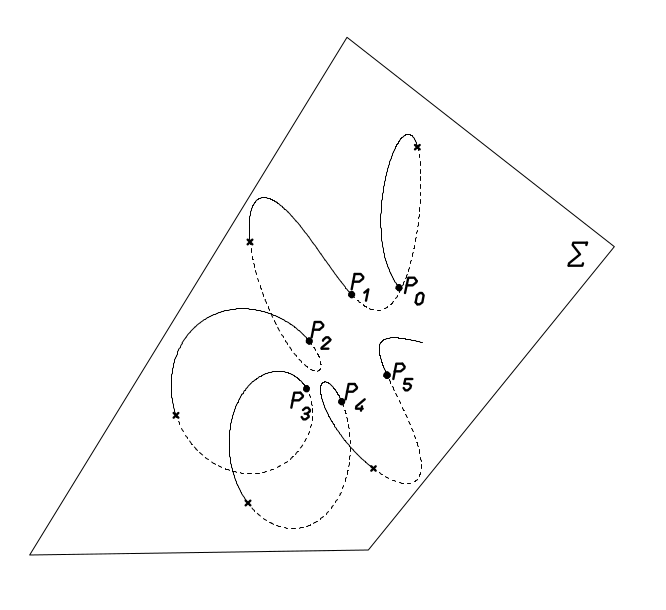
La sezione di Poincaré è un utile metodo per investigare le proprietà di un sistema dinamico. Sia data l’equazione differenziale autonoma in ℝn

e sia Σ ⊂ ℝn una ipersuperficie di dimensione n − 1 ortogonale al flusso Φ t(x0) con x0 ∈ Σ condizione iniziale del sistema. Si definisce sezione di Poincaré l’applicazione

dove Ti è il tempo di ritorno i−esimo del flusso partito da x0 (e.g. T1 è il tempo
del primo ritorno del flusso su Σ), con la condizione aggiuntiva che il verso della
derivata ẋ(Ti) = f(xi) è di segno concorde con quello iniziale ẋ(0) = f(x0)
rispetto alla normale all’ipersuperficie Σ.
Il modello di Hénon e Heiles è descritto dall’Hamiltoniana

Siamo nel caso n = 4; fissando il valore dell’energia possiamo ottenere delle superfici di dimensione 3, al fine di studiare successivamente le sezioni di Poincaré del modello. Facciamo qualche osservazione sul comportamento di questo modello:


e deduciamo che un punto (p2,q2) delle sezioni di Poincaré individua in modo univoco un’orbita dal momento che abbiamo q1 = 0 e p1 dato dall’equazione precedente assumendo che il segno sia positivo;

lo studio di tale potenziale mostra che la sezione di Poincaré è limitata alla regione individuata dall’equazione
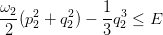
purchè E sia minore della velocitè di fuga individuata da

 (t),
(t), (t)) = (−p(−t),q(−t)).
(t)) = (−p(−t),q(−t)).
Lo studio delle sezioni di Poincaré del modello è stato effettuato utilizzando un mini-cluster costituito da 15 Raspberry Pi, la cui descrizione dettagliata è disponibile alla corrispondente pagina web.
Utilizzando tale infrastruttura,
è stato possibile eseguire in parallelo un programma scritto in
linguaggio C, che calcola le sezioni di Poincaré per 15 valori
diversi delle condizioni iniziali, a fissato livello di energia
E =
0.039344.
Il suddetto programma (che si chiama omp_henon-heiles-sez-poin.c), il
file che definisce i valori
di ω1, ω2
e delle condizioni iniziali, insieme a tutti gli script di comandi (i
quali permettono di eseguire il programma in parallelo su tutti i
Raspberry) sono stati archiviati e compressi nel file
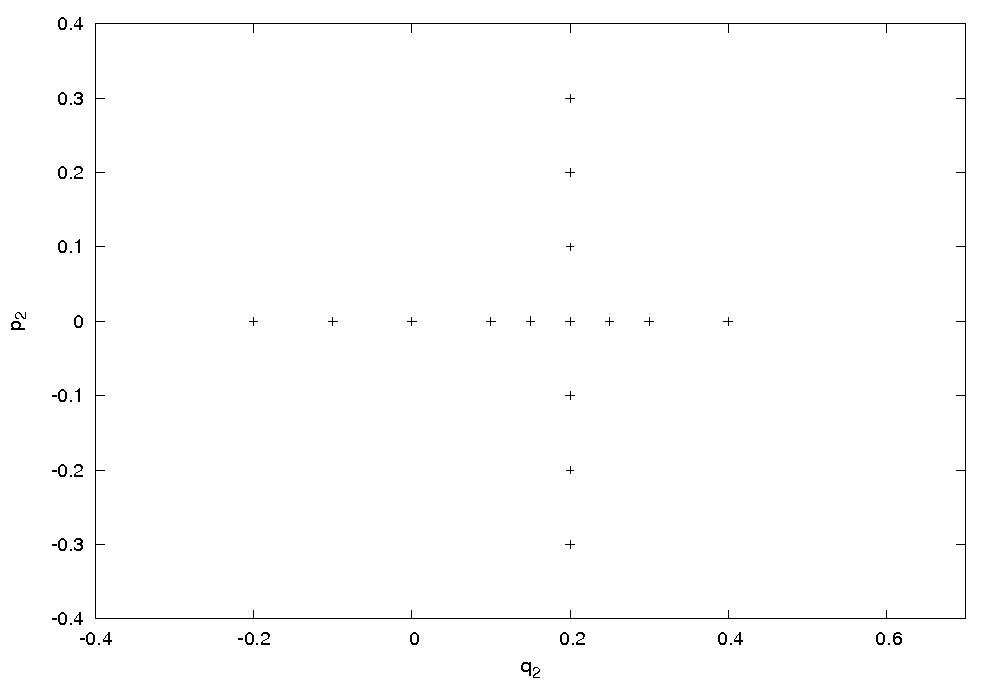
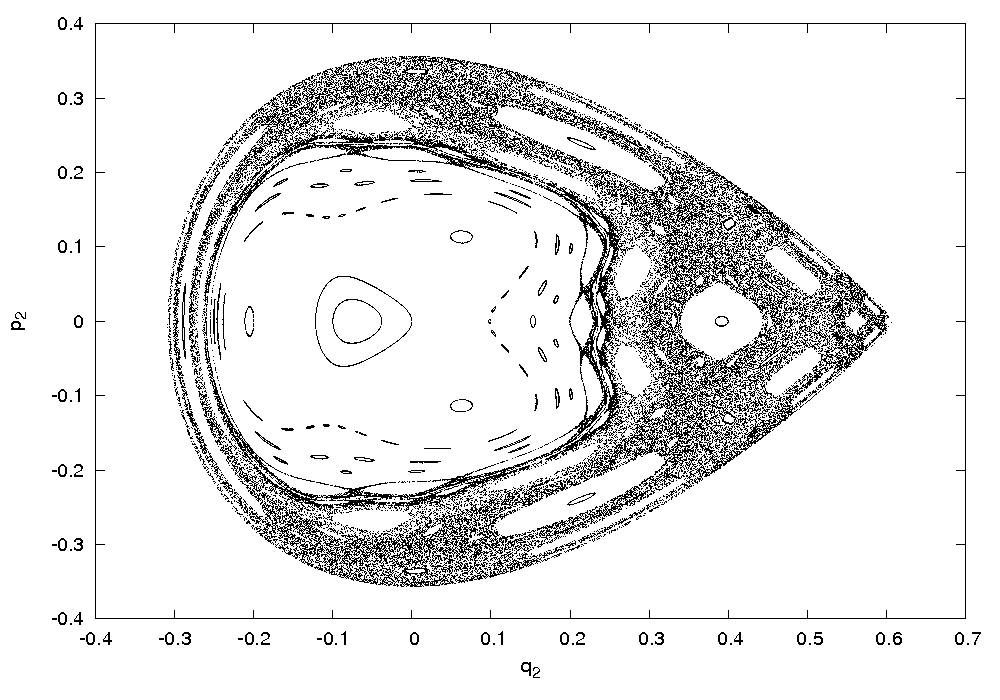
L’algoritmo di integrazione utilizzato è il metodo SBAB3C introdotto da Laskar e Robutel in [5]. A sua volta il metodo SBAB3C puè essere visto come una evoluzione di quello del punto centrale, o Leap-Frog, che è accuratamente descritto in [3]. Le seguenti figure mostrano rispettivamente le condizioni iniziali del sistema su cui è stata fatta l’integrazione e le sezioni di Poincaré nello spazio delle fasi (q2,p2).
 − 1)∕2) del modello di Hénon e Heiles corrispondente al valore
dell’energia E = 0.039344 , che è leggermente inferiore a quello di fuga.
− 1)∕2) del modello di Hénon e Heiles corrispondente al valore
dell’energia E = 0.039344 , che è leggermente inferiore a quello di fuga.
Il caso in esame, che è non
risonante (cioè tale
che ∄(k1,k2) ∈ ℤ2 \ (0, 0) per
cui si ha
che k1ω1 + k2ω2 =
0), mostra una zona centrale con curve chiuse invarianti
concentriche. Sono presenti delle zone in cui è possibile il
moto ordinato su curve chiuse 1D che stanno intorno ad orbite
periodiche. Tuttavia è molto ampia l’area della
superficie che viene riempita in maniera apparentemente erratica e
abbastanza uniforme dall’orbita che parte da un punto iniziale
all’interno di quella stessa regione. Questo comportamento
è tipico delle orbite caotiche (cfr.
[2])
Lo scenario è quindi il medesimo
rispetto a quello descritto, ad esempio,
in [6],
dove troviamo anche un’analisi per diversi livelli di energia e
una breve discussione del caso risonante.
Per comprendere i vantaggi
dell’uso del mini-cluster, il programma è stato eseguito
anche su Marvin, cioè il server/workstation principale del
nostro cluster. I tempi di esecuzione riportati nel seguito sono
stati ottenuti utilizzando il comando time.
Per comprendere meglio le differenze tra i due apparati, è bene ricordare che il
mini-cluster è composto da 15 Raspberry Pi 3, ciascuno equipaggiato
con un processore quad-core da 1.2GHz a 64bit con architettura ARM,
mentre Marvin monta un processore Intel i5 quad-core da 3.3 GHz a
64bit.
Il tempo che corrisponde al parametro
real è il tempo totale per l’esecuzione del programma; in
esso si tiene conto anche dei tempi di lettura e scrittura da file,
nonché di quelli necessari al passaggio di informazioni tra
Raspberry e Marvin; il "real time" dipende quindi anche dalla
velocitè della rete locale. Lo "user time" fornisce invece il
valore del tempo effettivo di utilizzo della CPU, così come
richiesto dall'esecuzione dall'esecuzione del programma. Per maggiori
dettagli sulle specifiche di questi tempi si rimanda ai manuali
tecnici.
Per studiare al meglio i diversi comportamenti di Marvin e del mini-cluster il programma è stato eseguito prima per un tempo totale di integrazione numerica delle equazioni del moto TF = 105 e poi con T F = 106, essi corrispondono, rispettivamente, al tracciamento di circa 10 migliaia e 100 migliaia di punti per ciascuna delle sezioni di Poincaré.
Analizzando i tempi di esecuzione
per TF =
105 si nota che il tempo
totale di esecuzione (real) è maggiore per i Raspberry di circa
21 secondi. È molto interessante notare che su Marvin il tempo
totale di esecuzione e il tempo effettivo di calcolo differiscono per
meno di un secondo, mentre la differenza è molto più
marcata per il mini-cluster. Il fatto che il tempo complessivo (real)
di esecuzione sia maggiore per i Raspberry è quasi certamente
dovuto alla necessità di inviare e ricevere le informazioni
tramite rete locale, con il passaggio di numerosi file tra Marvin e i
Raspberry. Quando il programma viene eseguito solo su Marvin non
è necessario trasferire alcun file, con un evidente risparmio
di tempo.
Per quanto riguarda il tempo
effettivo di calcolo, il mini-cluster è in leggero vantaggio e
se ne può concludere che la parallelizzazione del problema
ottiene l’effetto sperato, cioè la riduzione del tempo di
calcolo effettivo.
Il secondo test, effettuato con tempo
di
integrazione TF =
106, mette maggiormente
in evidenza il vantaggio di utilizzare un mini-cluster per problemi
come quello considerato, che ben si prestano alla
parallelizzazione. Infatti in questo secondo test il mini-cluster
batte Marvin sul tempo totale di esecuzione. Analizzando i tempi,
complessivamente Marvin impiega ben 2 minuti e 19 secondi in
più per completare l'esecuzione del programma; anche in questo
caso quasi tutto il tempo è impiegato per effettuare i calcoli
richiesti dal programma stesso. Il mini-cluster impiega circa 13
minuti per eseguire il programma, di cui circa 12 minuti sono
dovuti al tempo di calcolo effettivo. Si osserva quindi che per problemi
ben parallelizzabili e su tempi relativamente lunghi, il mini-cluster
offre un certo vantaggio rispetto all’uso di una singola
macchina, sebbene ben più potente, come Marvin.
A questa analisi sui tempi, si possono
aggiungere alcune considerazioni sui costi dell’hardware: sia il
prezzo di Marvin, che quello richiesto dal mini-cluster composto da 15
Raspberry, è stato di circa
900€. Chiaramente i costi
possono variare a seconda del momento dell’acquisto, del
rivenditore, dei componenti scelti e degli eventuali accessori. Per
valutare l’economicità dei diversi apparati, è da
non sottovalutare il fatto che ogni Raspberry fornisce una licenza
gratuita del software Mathematica, che permette di effettuare il
calcolo simbolico in modi che sarebbero assai costosi su un Personal
Computer tradizionale.
Alla luce di queste considerazioni, la
parallellizzazione su un mini-cluster si rivela particolarmente
vantaggiosa rispetto all’uso di un solo computer, sebbene
quest’ultimo sia molto più potente di ciascun Raspberry.
In un futuro relativamente breve, ci si aspetta di poter ulteriormente
esplorare questo aspetto, nell'ambito della simulazione numerica di
problemi scientifici che richiedono una discreta potenza di
calcolo.
TF = 105
| tempi sui Raspberry | tempi su Marvin | ||||||||||||||||||
|
|
TF = 106
| tempi sui Raspberry | tempi su Marvin | ||||||||||||||||||
|
|
[1] Benettin, G. e Giorgilli, A.: On the Hamiltonian interpolation of near-to-the-identity symplectic mappings with application to symplectic integration alghoritms, Journal of Statistical Physics, vol 74 n. 5/6, 1117-1143 (1994).
[2] Celletti, A.: Stability and Chaos in Celestial Mechanics, Springer, 2010.
[3] Giorgilli, A.: Metodi e Modelli Matematici per le Applicazioni, http://www.mat.unimi.it/users/antonio/metmod/metmod.html.
[4] Hénon, M. Heiles, C.: The applicability of the third integral of motion: Some numerical experiments, The Astronomical Journal, vol 69: 73-79 (1964).
[5] Laskar, J. Robutel, P.: High order symplectic integrators for perturbed Hamiltonian systems, Celestial Mechanics and Dynamical Astronomy, vol 80: 39-62 (2001).
[6] Locatelli U.: Appunti sul modello di Hènon e Heiles, http://www.mat.uniroma2.it/~locatell/master_STS/note_HH_e_int_simpl.pdf.