Differential calculus in higher dimension
In this part of the course we work on the following skills:
- Become comfortable working with coordinates in arbitrary dimension.
- Develop an intuition for working with vector fields.
- Understand the subtleties of derivatives in dimension greater than 1, evaluate and manipulate partial derivatives, directional derivatives, Jacobian.
See also the exercises associated to this part of the course.
Here we start to consider higher dimensional space. That is, instead of
Definition (inner product)
We recall that the inner product being zero has a geometric meaning, it means that the two vectors are orthogonal. We also recall that the "length" of a vector is given by the norm, defined as follows.
Definition (norm)
For example, in
The primary higher-dimensional functions we consider in this course are:
- Scalar fields:
- Vector fields:
- Paths:
- Change of coordinates:
These possibilities all fit into the general pattern of
Open sets, closed sets, boundary, continuity
Let
Definition (interior point)
Let
Definition (open set)
A set

For example, open intervals, open disks, open balls, unions of open intervals, etc., are all open sets.
Lemma
Let
Proof
Let
Observe that the radius of the ball will be small for points close to the boundary.
Definition (Cartesian product)
If
Analogously the Cartesian product can be defined in higher dimensions: If
Lemma
If
Proof
Let

Discussing the "interior" of the set naturally suggests the topic of the "boundary" of the set. In the following definitions we develop this idea.
Definition (exterior points)
Let
Observe that
Definition (boundary)
The set
Definition (closed)
A set
Lemma
Proof
Observe that
Limits and continuity
Let
Definition (Continuous)
A function
Even functions which look "nice" can fail to be continuous as we can see in the following example.
Example (continuity in higher dimensions)
Let
and
| line | value |
|---|---|
Theorem
Suppose that
, for every , , .
We prove a couple of the parts of the above theorem here, the other parts are left as exercises.
Proof of part 3.
Observe that
Since we already know that
Proof of part 4.
Take
When writing a vector field (or similar functions) it is often convenient to divide the higher-dimensional function into smaller parts. We call these parts the components of a vector field. For example
Theorem
Let
Proof
We will independently prove the two implications.
- (
) Let , and observe that . We have already shown that the continuity of two vector fields implies the continuity of the inner product. - (
) By definition of the norm and we know as .
In higher dimensions the analogous statement is true for the vector field
Example (polynomials)
A polynomial in
E.g.,
Example (rational functions)
A rational function is a scalar field
where
As described in the following result, the continuity of functions continues to hold, in an intuitive way, under composition of functions.
Theorem
Suppose
makes sense. If
Proof
Example
We can consider the scalar field
Derivatives of scalar fields
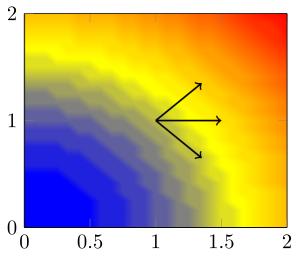
We can imagine, for example in the figure, that in higher dimensions, the derivative of a scalar field depends on the direction. This motivates the following.
Definition (directional derivative)
Let
When
Theorem
Suppose
In particular
Proof
By definition
The following result is useful for proving later results.
Theorem (mean value)
Assume that
Proof
Apply mean value theorem to
The following notation is convenient. For any
Definition (partial derivatives)
We define the partial derivative in
Remark
Various symbols used for partial derivatives:
In practice, to compute the partial derivative
If
More precisely, we know that
Definition (differentiable)
Let
where
For future convenience we introduce the following notation.
Definition (gradient)
The gradient of the scalar field
In general, when working in
Theorem
If
where
Proof
Since
In particular
Theorem
If
Proof
Observe that
and so this tends to
Theorem
Suppose that
Proof
For convenience define the vectors
Observe that
Using the mean value theorem we know that there exists
To conclude, observe that the second sum vanishes as
Chain rule
When we are working in
Example
Suppose that
In situations like the above example it is convenient to consider the derivative of a path
Here

Theorem
Let
Suppose that
Proof
Since
Observe that
Example
A particle moves in a circle and its position at time
The temperature at a point

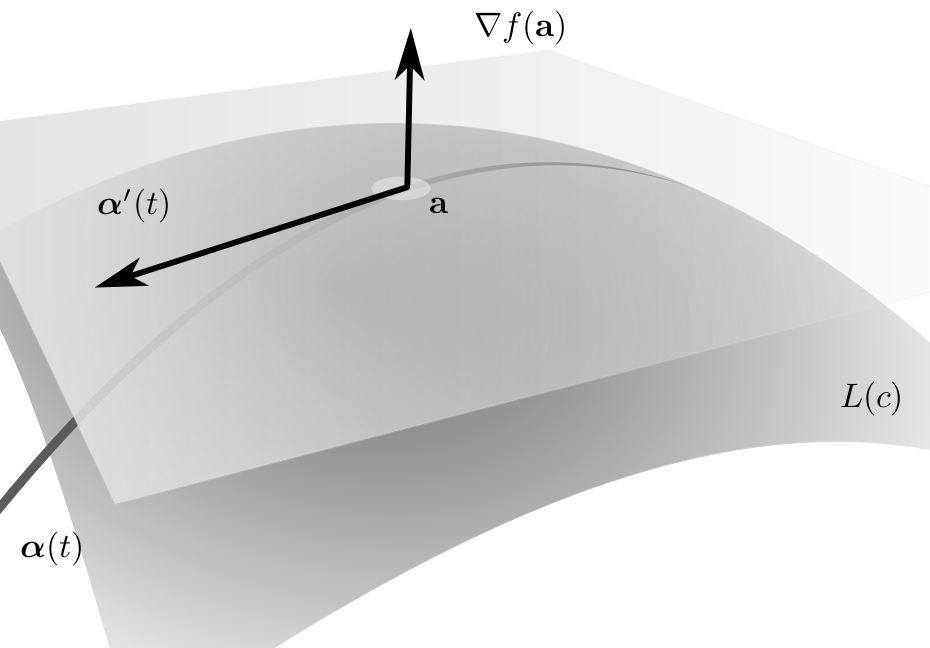
Level sets & tangent planes
Let
The set
for all
is normal to the curve at - Tangent line at
is
This is because the chain rule implies that
Example
Let
- If
then is a sphere, is a single point , - If
then is empty.
Example
Let
- If
then is a one-sheeted hyperboloid, is an infinite cone, - If
then is a two-sheeted hyperboloid.




Let
- The gradient
is normal to every curve in the surface which passes through , - The tangent plane at
is .
Same argument as in
Derivatives of vector fields
Essentially everything discussed above for scalar fields extends to vector fields in a predictable way. This is because of the linearity and that we can consider each component of the vector field independently.
Definition (directional derivative)
Let
Remark
If we use the notation
Definition (differentiable)
We say that
Theorem
If
Proof
Same as for the case of scalar fields when
Jacobian matrix & the chain rule
The relevant differential for higher-dimensional functions is the Jacobian matrix.
Definition (Jacobian matrix)
Suppose that
The Jacobian matrix is defined analogously in any dimension. I.e., if
If we choose a basis then any linear transformation
Let
where
Here we see that in higher dimensions we have a matrix form of the chain rule.
Theorem
Let
Let
Proof
Let
Example (polar coordinates)
Here we consider polar coordinates and calculate the Jacobian of this transformation. We can write the change of coordinates
as the function
In particular we see that
Suppose now that we wish to calculate derivatives of
In other words, we have shown that
Implicit functions & partial derivatives
Just like with derivatives, we can take higher order partial derivatives. For convenience when we want to write
We first consider the question of when
Example (partial derivative problem)
Let
We calculate that
Theorem
Let
In many cases we can choose to write a given curve/function either in implicit or explicit form.
| Implicit | Explicit |
|---|---|
| A mess? | |
| A huge mess? |
Given the above observation, the following method of calculating derivatives is sometimes useful. Suppose that some
Let
Consequently