|
Lezioni di Geometria Franco Ghione |
|
Cambiamenti di coordinate in uno spazio euclideo Ricordiamo che un sistema di riferimento cartesiano nello spazio euclideo tridimensionale è una quaterna (O,i,j,k) dove O è un fissato punto dello spazio detto origine e i, j, k una base ortonormale per lo spazio dei vettori geometrici. Se P è un punto dello spazio, le componenti (x,y,z) del vettore OP sono, per definizione, le coordinate cartesiane di P nel dato riferimento: Consideriamo ora un nuovo sistema di coordinate cartesiano (O',i',j',k'), lo stesso punto P avrà nel nuovo sistema le coordinate (x',y',z'). In nostro scopo è quello di trovare come cambiamo le coordinate cambiando il sistema di riferimento. e quindi, se O'=(o1,o2,o3) sono le coordinate della nuova origine O' nel vecchio sistema di riferimento, le relazione precedente diventa e da questo, ordinando i fattori, abbiamo le formule cercate dirette e inverse.  Supponiamo ora di modificare la base ortonormale senza modificare la posizione dell'origine. Scriviamo i vettori della nuova base come combinazioni lineari di quelli della vecchia base:  La matrice N definita come sopra si chiama matrice del cambiamento di base. Attenzione agli indici: le componenti dei vettori sono messi come colonne nella matrice N. Notiamo che il prodotto scalare i'.i' è il prodotto dalla prima colonna per la prima colonna della matrice N e, poichè i' è un versore, questo prodotto fa 1. Analogamente il prodotto scalare di i' per j' è il prodotto della prima colonna per la seconda colonna della matrice N. In generale il prodotto (righe per colonne) della matrice Nt, che ha per righe le colonne di N, con la matrice N viene la matrice identità. Tali matrici, quelle cioè per le quali l'inversa coincide con la trasposta, si chiamano matrici ortogonali. Poiché tali martici possono avere determinate 1 o -1. Le matrici ortogonali di determinate 1 si chiamano matrici ortogonali speciali. x'(a11i+a21j+a31k) +y'(a12i+a22j+a32k) + z'(a13i+a23j+a33k) = (a11x' + a12y' + a13z')i + (a21x' + a22y' + a23z')j + (a31x' + a32y' + a33z')k e quindi, dato che un vettore si scrive in modo unico come combinazione lineare dei vettori della base, abbiamo le formule  formule che, usando la notazione matriciale, possono scriversi  Se infine passiamo dal riferimento (O,i,j,k) al riferimento (O',i,j,k) e da questo al riferimento (O',i',j',k') le coordinate (x,y,z) si trasformeranno, cambiando origine senza cambiare base, nelle coordinate (x',y',z') e queste, cambiando base senza cambiare origine, nelle coordinate (x'',y'',z'') secondo le formule che abbiamo visto sopra:  In definitiva se abbiamo due sistemi di riferimento cartesiani (O,i,j,k) e (O',i',j',k') e se, (x,y,z) sono le coordinate di un punto P nel primo sistema di riferimento e (x',y',z') quelle dello stesso punto P nel secondo sistema di riferimento, allora sussistono le relazioni  dove (o1,o2,o3) sono le coordinate della nuova origine nel vecchio sistema di riferimento e N è la matrice del cambiamento di base. 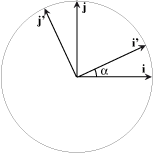  Vediamo ora, con un esempio significativo, come sia possibile modificare il sistema di riferimento in modo che una equazione di secondo grado nelle tre incognite x,y,z, si trasformi nella equazione canonica di una quadrica nelle nuove incognite x',y',z'. Sia essendo k una costante reale assegnata. Cominciamo col prendere in esame la forma quadratica 5x2 + 4xy + 6y2 - 4yz + 7z2 e scriviamo la matrice simmetrica A associata a questa forma: 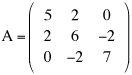 Poichè A é simmetrica un fondamentale teorema di algebra lineare ci assicura che A può essere diagonalizzata con una matrice ortogonale speciale. Per fare questo cominciamo a calcolare gli autovalori di A. Questi sono quei numeri  e quindi gli autovalori sono 3,6,9. Calcoliamo ora gli autovettori. Per fare questo dobbiamo trovare soluzioni non nulle per i tre sistemi relativi all'autovalore 3,6, 9 rispettivamente  Per 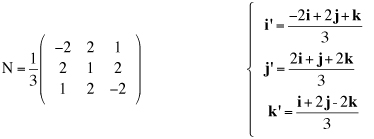 Le formula per il cambiamento di coordinate, dirette e inverse, sono dunque 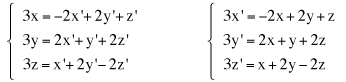 che sostituite nell'equazione iniziale forniscono la nuova equazione Dobbiamo ora spostare l'origine completando i quadrati. Abbiamo cioè e, in definitiva le formule del cambiamento di coordinate sono 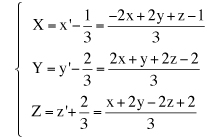 Si riconosce ora che la superficie, se k+7>0, è un ellissoide. |